

不断引进、开发、生产与工业自动化控制、测量、导航有关的技术和产品
努力拓展市场,扩大产品应用领域,实现企业效益和社会效益共赢
Product center
产品中心
致力于工业自动化、通信、导航、测姿领域产品的开发、销售和技术支持



Subsonus 声波导航系统
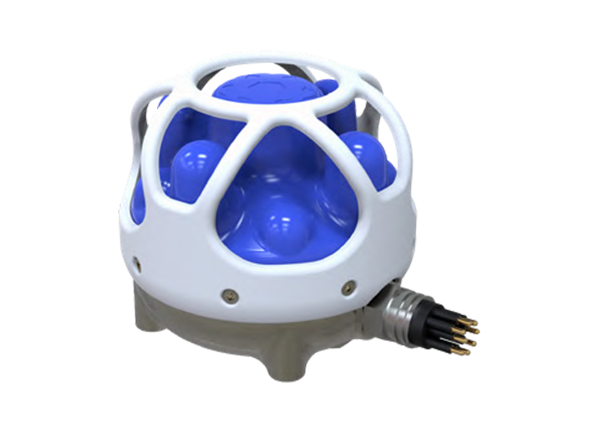


◎ 产品概述
Subsonus 是一款紧凑、独立的超短基线水下声学定位收发器。它通过结合以下技术,精确计算自身及其他收发器的位置、方向和速度:
- 先进的声波束形成技术
- 其板载传感器及可用外部输入提供的惯性导航系统数据
- 外部参考的GNSS位置数据
- 精密的传感器融合算法
◎ 产品特点
♦ 定位精度0.1m
♦ 横滚和俯仰0.1°
♦ 声学航向0.3°
♦ 探测范围和深度1000m
♦ 拥有行业领先的8个水听器阵列,使得Subsonus能提供高精度的测量
♦ Subsonus具有声学航向传输功能,水下单元无需陀螺仪即可实现高精度导航,且不受磁干扰
♦ Subsonus系统能透过水测量声波速度,使其不需要额外的设备干预,实现自调节。以保障系统的最佳性能
♦ 以太网供电(POE)通信,带辅助 NMEA 输出
◎ 应用范围
♦ 自主水下航行器(AUV)与遥控水下航行器(ROV)导航
♦ 潜水员追踪
♦ 水下测绘
◎ Subsonus声波导航系统的技术指标
特性 | 参数 | |
导航系统 | 定位精度(5 m量程) | ±0.1m |
定位精度(100 m量程) | ±0.5m | |
定位精度(1000 m量程) | ±5m | |
角度精度(信噪比20dB) | ±0.1°RMS | |
角度精度(5 m量程) | ±17.5mm | |
角度精度(100 m量程) | ±0.175m | |
角度精度(1000 m量程) | ±1.75m | |
速度精度 | 0.01m/s | |
声学航向精度 | ±0.3° | |
IMU横摇与纵摇精度 | ±0.1°(内部MEMS) | |
IMU垂向精度(取较大值) | 5%或0.05m | |
内部滤波频率 | 1000Hz | |
输出数率 | 最高50Hz | |
INS状态解算延迟 | 0.6ms | |
声学特性 | 水听器数量 | 8个 |
工作频率范围 | MF (20 to 32 kHz) | |
主通信频率 | 30KHz | |
最大声学定位量程 | 995m(受固件限制;超出此范围可能受出口限制) | |
声学覆盖范围 | 300° 半球形 | |
声学更新率 | 最高10Hz | |
传感器性能 | 压力传感器量程 | 0 – 1000m |
压力传感器精度 | 满量程深度的±0.15%(±1.5m) | |
温度传感器量程 | -20℃~40℃ | |
温度传感器精度 | ±2℃ | |
物理特性 | 工作电压 | 9V ~ 60V DC 符合IEEE 802.3at - 2009以太网供电(PoE)标准 |
平均功率 | 10 W | |
最大功率 | 25 W | |
通信接口 | 符合IEEE 802.3u - 1995标准(100BASE - TX以太网) | |
定时同步 | 支持精确时间协议(PTP)和网络时间协议(NTP) | |
工作深度等级 | 995m(受国际武器贸易条例/防务出口限制;生存深度为1500米) | |
工作温度 | -20 ℃~40 ℃ | |
生存温度 | -40 ℃~85 ℃ | |
冲击极限 | 40 g | |
尺寸 | 106 x 106 x 93 mm | |
重量 | 1170g(空气中),650g(水中) |
北京和田星通科技开发有限公司
联系地址:北京市海淀区翠微中里14号楼四层A1326
联系电话:13260408116
Focus on product development and services
诚实守信、锐意进取、科技创新、合作共赢
专业提供测姿、导航、自动化系列解决方案